
Group Normalization
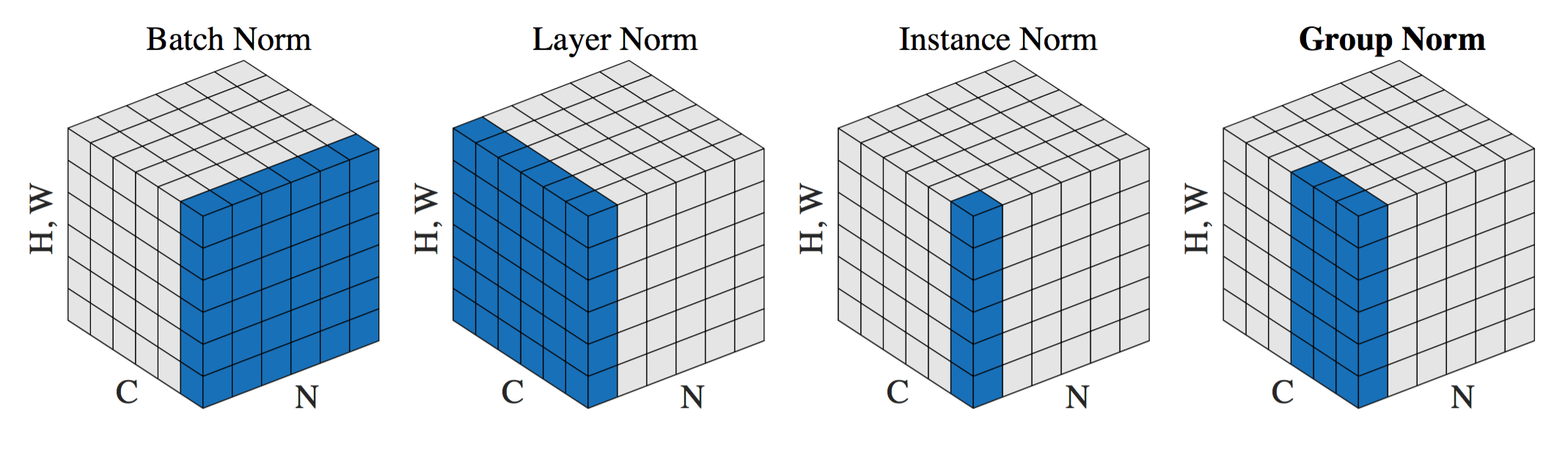
BN在batch的维度上norm,归一化维度为[N,H,W],对batch中对应的channel归一化;
LN避开了batch维度,归一化的维度为[C,H,W];
IN归一化的维度为[H,W];
而GN介于LN和IN之间,其首先将channel分为许多组,对每一组做归一化,及先将feature的维度由[N, C, H, W]reshape为[N, G,C//G , H, W],归一化的维度为[C//G , H, W];
def norm(x, norm_type, is_train, G=32, esp=1e-5):
with tf.variable_scope('{}_norm'.format(norm_type)):
if norm_type == 'none':
output = x
elif norm_type == 'batch':
output = tf.contrib.layers.batch_norm(
x, center=True, scale=True, decay=0.999,
is_training=is_train, updates_collections=None
)
elif norm_type == 'group':
# normalize
# tranpose: [bs, h, w, c] to [bs, c, h, w] following the paper
x = tf.transpose(x, [0, 3, 1, 2])
N, C, H, W = x.get_shape().as_list()
G = min(G, C)
x = tf.reshape(x, [N, G, C // G, H, W])
mean, var = tf.nn.moments(x, [2, 3, 4], keep_dims=True)
x = (x - mean) / tf.sqrt(var + esp)
# per channel gamma and beta
gamma = tf.get_variable('gamma', [C],
initializer=tf.constant_initializer(1.0))
beta = tf.get_variable('beta', [C],
initializer=tf.constant_initializer(0.0))
gamma = tf.reshape(gamma, [1, C, 1, 1])
beta = tf.reshape(beta, [1, C, 1, 1])
output = tf.reshape(x, [N, C, H, W]) * gamma + beta
# tranpose: [bs, c, h, w, c] to [bs, h, w, c] following the paper
output = tf.transpose(output, [0, 2, 3, 1])
else:
raise NotImplementedError
return output
看我写的辛苦求打赏啊!!!有学术讨论和指点请加微信manutdzou,注明
